Initialization
Initialization is the process of providing NEON with enough information to solve the user’s heading, scale and drift error. When the software first starts up, it has no information about how the user walks or what direction they are facing. It requires the user to walk around to calibrate to that users’ specific gait.
Initialization is similar to Google Maps. When a user starts the app in a parking garage, the user will have to travel some distance before it locks on to the heading. The main way to initialize in Mapper Mode is with double check-ins.
Initialization Status
The initialization Nav Lock status displays 1-4 bars indicating the ability to maintain the current 2D location accuracy in areas without GPS or infrastructure. The “Nav Lock” is on the top toolbar of the app.

More bars can be obtained by performing a user check-in, or by walking around an area with GPS, infrastructure (BLE Beacons, UWB Beacons, Stairs, Elevators, etc.). If the “Nav Lock” status displays a floor number, it indicates floor level accuracy will also be maintained.
Double Check-ins
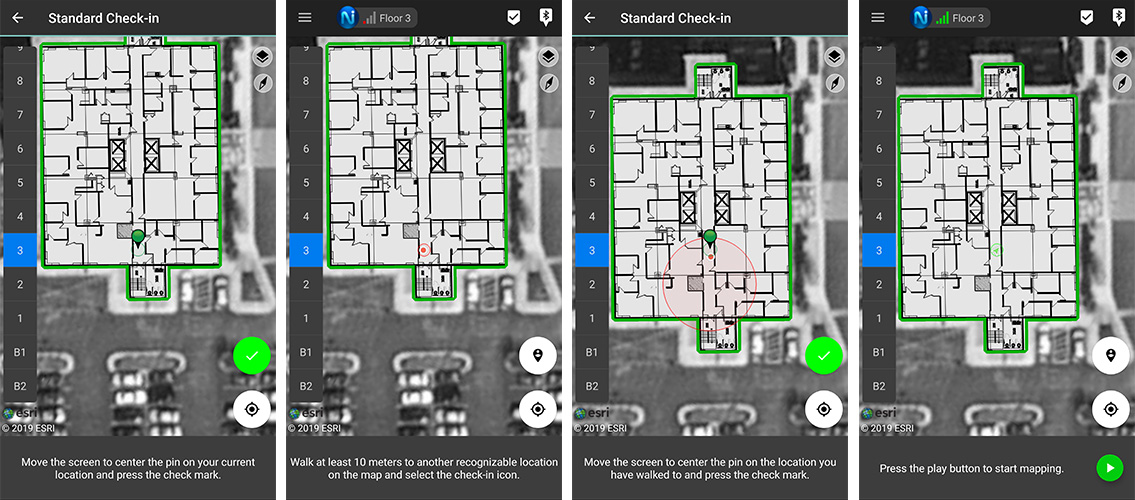
The best way to initialize is with double check-ins. The user will walk to an easily identifiable location on the map (typically a hallway intersection or doorway) and check in by placing a pin at their actual location. Once the check-in is applied, the user’s location will update to that location. It is common for the heading to be off during the first couple of steps. This will be corrected with the second check-in.
The user walks about 10 meters and performs another check-in. After completing the second check-in, initialization will either succeed or fail. If it succeeds, the nav lock status will display four green bars. If it fails, the user should walk 10 meters and check in again.